
Strip Pooling:重构池化的空间注意力机制
本文复现了CVPR2020:Strip Pooling注意力机制,该网络轻量化且即插即用,重新构建了Strip Pooling机制,实现了空间注意力机制。
① 项目背景
-
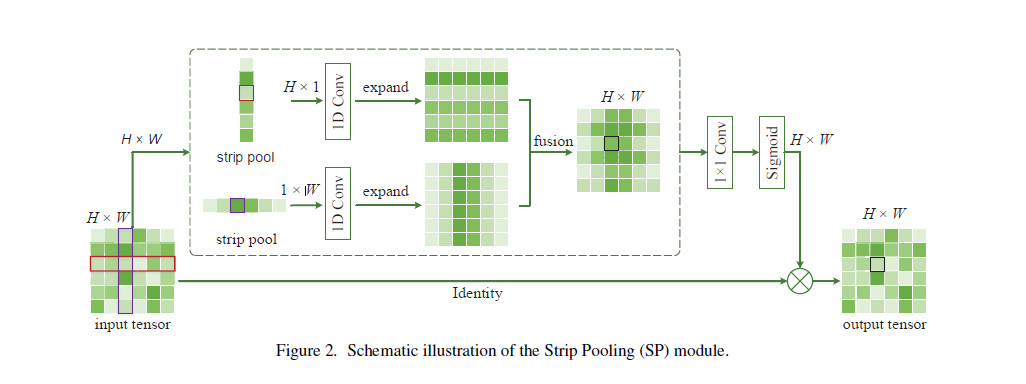
1.事实证明,空间池化在捕获用于场景解析等像素级预测任务的远程上下文信息方面非常有效。在本文中,除了通常具有N x N规则形状的常规空间池化之外,我们通过引入一种称为strip pooling的新池化策略来重新考虑空间池化的公式,该策略考虑了一个长而窄的核,即1 x N或N x1。基于strip pooling,我们进一步研究空间池化体系结构的设计方法。
-
2.池化操作是在逐像素预测任务中获取较大感受野范围较为高效的做法,传统一般采取N ∗N N* NN∗N的正规矩形区域进行池化,在这篇文章中引入了一种新的池化策略,就是使用长条形的池化kernel来实现池化,即是池化的核心被重新设计为构建了strip pooling操作。
-
3.这个操作的引入使得网络可以更加高效获取网络大范围感受野下的信息,在这个理念的基础上搭建了使用多个长条池化层构建的新模块。
论文地址:https://arxiv.org/pdf/2003.13328.pdf
② 数据准备
2.1 解压缩数据集
我们将网上获取的数据集以压缩包的方式上传到aistudio数据集中,并加载到我们的项目内。
在使用之前我们进行数据集压缩包的一个解压。
!unzip -oq /home/aistudio/data/data69664/Images.zip -d work/dataset
import paddle
import numpy as np
from typing import Callable
#参数配置
config_parameters = {
"class_dim": 16, #分类数
"target_path":"/home/aistudio/work/",
'train_image_dir': '/home/aistudio/work/trainImages',
'eval_image_dir': '/home/aistudio/work/evalImages',
'epochs':100,
'batch_size': 32,
'lr': 0.01
}
2.2 划分数据集
接下来我们使用标注好的文件进行数据集类的定义,方便后续模型训练使用。
import os
import shutil
train_dir = config_parameters['train_image_dir']
eval_dir = config_parameters['eval_image_dir']
paths = os.listdir('work/dataset/Images')
if not os.path.exists(train_dir):
os.mkdir(train_dir)
if not os.path.exists(eval_dir):
os.mkdir(eval_dir)
for path in paths:
imgs_dir = os.listdir(os.path.join('work/dataset/Images', path))
target_train_dir = os.path.join(train_dir,path)
target_eval_dir = os.path.join(eval_dir,path)
if not os.path.exists(target_train_dir):
os.mkdir(target_train_dir)
if not os.path.exists(target_eval_dir):
os.mkdir(target_eval_dir)
for i in range(len(imgs_dir)):
if ' ' in imgs_dir[i]:
new_name = imgs_dir[i].replace(' ', '_')
else:
new_name = imgs_dir[i]
target_train_path = os.path.join(target_train_dir, new_name)
target_eval_path = os.path.join(target_eval_dir, new_name)
if i % 5 == 0:
shutil.copyfile(os.path.join(os.path.join('work/dataset/Images', path), imgs_dir[i]), target_eval_path)
else:
shutil.copyfile(os.path.join(os.path.join('work/dataset/Images', path), imgs_dir[i]), target_train_path)
print('finished train val split!')
finished train val split!
2.3 数据集定义与数据集展示
2.3.1 数据集展示
我们先看一下解压缩后的数据集长成什么样子,对比分析经典模型在Caltech101抽取16类mini版数据集上的效果
import os
import random
from matplotlib import pyplot as plt
from PIL import Image
imgs = []
paths = os.listdir('work/dataset/Images')
for path in paths:
img_path = os.path.join('work/dataset/Images', path)
if os.path.isdir(img_path):
img_paths = os.listdir(img_path)
img = Image.open(os.path.join(img_path, random.choice(img_paths)))
imgs.append((img, path))
f, ax = plt.subplots(4, 4, figsize=(12,12))
for i, img in enumerate(imgs[:16]):
ax[i//4, i%4].imshow(img[0])
ax[i//4, i%4].axis('off')
ax[i//4, i%4].set_title('label: %s' % img[1])
plt.show()

2.3.2 导入数据集的定义实现
#数据集的定义
class Dataset(paddle.io.Dataset):
"""
步骤一:继承paddle.io.Dataset类
"""
def __init__(self, transforms: Callable, mode: str ='train'):
"""
步骤二:实现构造函数,定义数据读取方式
"""
super(Dataset, self).__init__()
self.mode = mode
self.transforms = transforms
train_image_dir = config_parameters['train_image_dir']
eval_image_dir = config_parameters['eval_image_dir']
train_data_folder = paddle.vision.DatasetFolder(train_image_dir)
eval_data_folder = paddle.vision.DatasetFolder(eval_image_dir)
if self.mode == 'train':
self.data = train_data_folder
elif self.mode == 'eval':
self.data = eval_data_folder
def __getitem__(self, index):
"""
步骤三:实现__getitem__方法,定义指定index时如何获取数据,并返回单条数据(训练数据,对应的标签)
"""
data = np.array(self.data[index][0]).astype('float32')
data = self.transforms(data)
label = np.array([self.data[index][1]]).astype('int64')
return data, label
def __len__(self):
"""
步骤四:实现__len__方法,返回数据集总数目
"""
return len(self.data)
from paddle.vision import transforms as T
#数据增强
transform_train =T.Compose([T.Resize((256,256)),
#T.RandomVerticalFlip(10),
#T.RandomHorizontalFlip(10),
T.RandomRotation(10),
T.Transpose(),
T.Normalize(mean=[0, 0, 0], # 像素值归一化
std =[255, 255, 255]), # transforms.ToTensor(), # transpose操作 + (img / 255),并且数据结构变为PaddleTensor
T.Normalize(mean=[0.50950350, 0.54632660, 0.57409690],# 减均值 除标准差
std= [0.26059777, 0.26041326, 0.29220656])# 计算过程:output[channel] = (input[channel] - mean[channel]) / std[channel]
])
transform_eval =T.Compose([ T.Resize((256,256)),
T.Transpose(),
T.Normalize(mean=[0, 0, 0], # 像素值归一化
std =[255, 255, 255]), # transforms.ToTensor(), # transpose操作 + (img / 255),并且数据结构变为PaddleTensor
T.Normalize(mean=[0.50950350, 0.54632660, 0.57409690],# 减均值 除标准差
std= [0.26059777, 0.26041326, 0.29220656])# 计算过程:output[channel] = (input[channel] - mean[channel]) / std[channel]
])
2.3.3 实例化数据集类
根据所使用的数据集需求实例化数据集类,并查看总样本量。
train_dataset =Dataset(mode='train',transforms=transform_train)
eval_dataset =Dataset(mode='eval', transforms=transform_eval )
#数据异步加载
train_loader = paddle.io.DataLoader(train_dataset,
places=paddle.CUDAPlace(0),
batch_size=32,
shuffle=True,
#num_workers=2,
#use_shared_memory=True
)
eval_loader = paddle.io.DataLoader (eval_dataset,
places=paddle.CUDAPlace(0),
batch_size=32,
#num_workers=2,
#use_shared_memory=True
)
print('训练集样本量: {},验证集样本量: {}'.format(len(train_loader), len(eval_loader)))
训练集样本量: 45,验证集样本量: 12
③ 模型选择和开发
3.1 对比网络构建
本次我们选取了经典的卷积神经网络resnet50,vgg19,mobilenet_v2来进行实验比较。
network = paddle.vision.models.vgg19(num_classes=16)
#模型封装
model = paddle.Model(network)
#模型可视化
model.summary((-1, 3,256 , 256))
network = paddle.vision.models.resnet50(num_classes=16)
#模型封装
model2 = paddle.Model(network)
#模型可视化
model2.summary((-1, 3,256 , 256))
3.2 对比网络训练
#优化器选择
class SaveBestModel(paddle.callbacks.Callback):
def __init__(self, target=0.5, path='work/best_model', verbose=0):
self.target = target
self.epoch = None
self.path = path
def on_epoch_end(self, epoch, logs=None):
self.epoch = epoch
def on_eval_end(self, logs=None):
if logs.get('acc') > self.target:
self.target = logs.get('acc')
self.model.save(self.path)
print('best acc is {} at epoch {}'.format(self.target, self.epoch))
callback_visualdl = paddle.callbacks.VisualDL(log_dir='work/vgg19')
callback_savebestmodel = SaveBestModel(target=0.5, path='work/best_model')
callbacks = [callback_visualdl, callback_savebestmodel]
base_lr = config_parameters['lr']
epochs = config_parameters['epochs']
def make_optimizer(parameters=None):
momentum = 0.9
learning_rate= paddle.optimizer.lr.CosineAnnealingDecay(learning_rate=base_lr, T_max=epochs, verbose=False)
weight_decay=paddle.regularizer.L2Decay(0.0001)
optimizer = paddle.optimizer.Momentum(
learning_rate=learning_rate,
momentum=momentum,
weight_decay=weight_decay,
parameters=parameters)
return optimizer
optimizer = make_optimizer(model.parameters())
model.prepare(optimizer,
paddle.nn.CrossEntropyLoss(),
paddle.metric.Accuracy())
model.fit(train_loader,
eval_loader,
epochs=100,
batch_size=1, # 是否打乱样本集
callbacks=callbacks,
verbose=1) # 日志展示格式
3.3 StripPooling注意力机制
3.3.1 SP模块的介绍

- MPM具体由两个子分支组成,具体来说:
- 1.如上图(a),为原始的PPM模块,可以用于捕获特征位置的短距离依赖关系。
- 2.如上图(b),使用strip pooling的方式,可以捕获更长距离特征之间的依赖关系。
这两种依赖关系对于网络的预测来说都至关重要。因此,MPM分别使用这两个分支生成对应的特征图,然后将两个子模块的输出拼接并用1x1卷积得到最终的输出特征。
import paddle
from paddle.fluid.layers.nn import transpose
import paddle.nn as nn
import math
import paddle.nn.functional as F
class SPBlock(nn.Layer):
def __init__(self, inplanes, outplanes, norm_layer=None):
super(SPBlock, self).__init__()
midplanes = outplanes
self.conv1 = nn.Conv2D(inplanes, midplanes, kernel_size=(3, 1), padding=(1, 0), bias_attr=False)
self.bn1 = nn.BatchNorm(midplanes)
self.conv2 = nn.Conv2D(inplanes, midplanes, kernel_size=(1, 3), padding=(0, 1), bias_attr=False)
self.bn2 = nn.BatchNorm(midplanes)
self.conv3 = nn.Conv2D(midplanes, outplanes, kernel_size=1, bias_attr=True)
self.pool1 = nn.AdaptiveAvgPool2D((None, 1))
self.pool2 = nn.AdaptiveAvgPool2D((1, None))
self.relu = nn.ReLU()
self.sigmoid = nn.Sigmoid()
def forward(self, x):
identity = x
_, _, h, w = x.shape
x1 = self.pool1(x)
x1 = self.conv1(x1)
x1 = self.bn1(x1)
x1 = paddle.expand(x1,[-1, -1, h, w])
#x1 = F.interpolate(x1, (h, w))
x2 = self.pool2(x)
x2 = self.conv2(x2)
x2 = self.bn2(x2)
x2 = paddle.expand(x2,[-1, -1, h, w])
#x2 = F.interpolate(x2, (h, w))
x = self.relu(x1 + x2)
x = x * self.sigmoid(self.conv3(x))
return x
if __name__ == '__main__':
x = paddle.randn(shape=[1, 16, 64, 128]) # b, c, h, w
sp_model = SPBlock(16,16)
y = sp_model(x)
print(y.shape)
[1, 16, 64, 128]
3.3.2 注意力多尺度特征融合卷积神经网络的搭建
import paddle.nn.functional as F
# 构建模型(Inception层)
class Inception(paddle.nn.Layer):
def __init__(self, in_channels, c1, c2, c3, c4):
super(Inception, self).__init__()
# 路线1,卷积核1x1
self.route1x1_1 = paddle.nn.Conv2D(in_channels, c1, kernel_size=1)
# 路线2,卷积层1x1、卷积层3x3
self.route1x1_2 = paddle.nn.Conv2D(in_channels, c2[0], kernel_size=1)
self.route3x3_2 = paddle.nn.Conv2D(c2[0], c2[1], kernel_size=3, padding=1)
# 路线3,卷积层1x1、卷积层5x5
self.route1x1_3 = paddle.nn.Conv2D(in_channels, c3[0], kernel_size=1)
self.route5x5_3 = paddle.nn.Conv2D(c3[0], c3[1], kernel_size=5, padding=2)
# 路线4,池化层3x3、卷积层1x1
self.route3x3_4 = paddle.nn.MaxPool2D(kernel_size=3, stride=1, padding=1)
self.route1x1_4 = paddle.nn.Conv2D(in_channels, c4, kernel_size=1)
def forward(self, x):
route1 = F.relu(self.route1x1_1(x))
route2 = F.relu(self.route3x3_2(F.relu(self.route1x1_2(x))))
route3 = F.relu(self.route5x5_3(F.relu(self.route1x1_3(x))))
route4 = F.relu(self.route1x1_4(self.route3x3_4(x)))
out = [route1, route2, route3, route4]
return paddle.concat(out, axis=1) # 在通道维度(axis=1)上进行连接
# 构建 BasicConv2d 层
def BasicConv2d(in_channels, out_channels, kernel, stride=1, padding=0):
layer = paddle.nn.Sequential(
paddle.nn.Conv2D(in_channels, out_channels, kernel, stride, padding),
paddle.nn.BatchNorm2D(out_channels, epsilon=1e-3),
paddle.nn.ReLU())
return layer
# 搭建网络
class TowerNet(paddle.nn.Layer):
def __init__(self, in_channel, num_classes):
super(TowerNet, self).__init__()
self.b1 = paddle.nn.Sequential(
BasicConv2d(in_channel, out_channels=64, kernel=3, stride=2, padding=1),
paddle.nn.MaxPool2D(2, 2))
self.b2 = paddle.nn.Sequential(
BasicConv2d(64, 128, kernel=3, padding=1),
paddle.nn.MaxPool2D(2, 2))
self.b3 = paddle.nn.Sequential(
BasicConv2d(128, 256, kernel=3, padding=1),
paddle.nn.MaxPool2D(2, 2),
SPBlock(256,256))
self.b4 = paddle.nn.Sequential(
BasicConv2d(256, 256, kernel=3, padding=1),
paddle.nn.MaxPool2D(2, 2),
SPBlock(256,256))
self.b5 = paddle.nn.Sequential(
Inception(256, 64, (64, 128), (16, 32), 32),
paddle.nn.MaxPool2D(2, 2),
SPBlock(256,256),
Inception(256, 64, (64, 128), (16, 32), 32),
paddle.nn.MaxPool2D(2, 2),
SPBlock(256,256),
Inception(256, 64, (64, 128), (16, 32), 32))
self.AvgPool2D=paddle.nn.AvgPool2D(2)
self.flatten=paddle.nn.Flatten()
self.b6 = paddle.nn.Linear(256, num_classes)
def forward(self, x):
x = self.b1(x)
x = self.b2(x)
x = self.b3(x)
x = self.b4(x)
x = self.b5(x)
x = self.AvgPool2D(x)
x = self.flatten(x)
x = self.b6(x)
return x
model = paddle.Model(TowerNet(3, config_parameters['class_dim']))
model.summary((-1, 3, 256, 256))
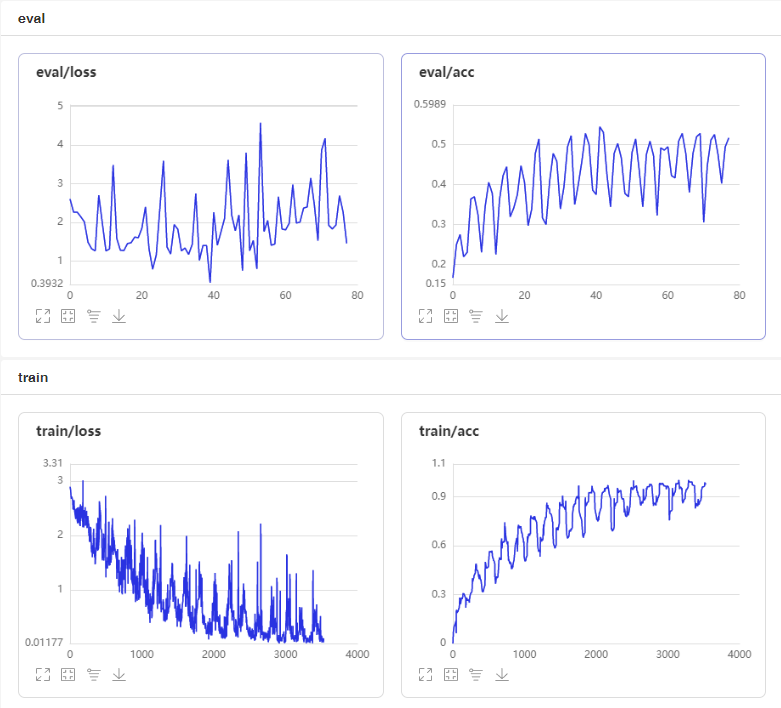
④改进模型的训练和优化器的选择
#优化器选择
class SaveBestModel(paddle.callbacks.Callback):
def __init__(self, target=0.5, path='work/best_model', verbose=0):
self.target = target
self.epoch = None
self.path = path
def on_epoch_end(self, epoch, logs=None):
self.epoch = epoch
def on_eval_end(self, logs=None):
if logs.get('acc') > self.target:
self.target = logs.get('acc')
self.model.save(self.path)
print('best acc is {} at epoch {}'.format(self.target, self.epoch))
callback_visualdl = paddle.callbacks.VisualDL(log_dir='work/CA_Inception_Net')
callback_savebestmodel = SaveBestModel(target=0.5, path='work/best_model')
callbacks = [callback_visualdl, callback_savebestmodel]
base_lr = config_parameters['lr']
epochs = config_parameters['epochs']
def make_optimizer(parameters=None):
momentum = 0.9
learning_rate= paddle.optimizer.lr.CosineAnnealingDecay(learning_rate=base_lr, T_max=epochs, verbose=False)
weight_decay=paddle.regularizer.L2Decay(0.0002)
optimizer = paddle.optimizer.Momentum(
learning_rate=learning_rate,
momentum=momentum,
weight_decay=weight_decay,
parameters=parameters)
return optimizer
optimizer = make_optimizer(model.parameters())
model.prepare(optimizer,
paddle.nn.CrossEntropyLoss(),
paddle.metric.Accuracy())
model.fit(train_loader,
eval_loader,
epochs=100,
batch_size=1, # 是否打乱样本集
callbacks=callbacks,
```python
model.prepare(optimizer,
paddle.nn.CrossEntropyLoss(),
paddle.metric.Accuracy())
model.fit(train_loader,
eval_loader,
epochs=100,
batch_size=1, # 是否打乱样本集
callbacks=callbacks,
verbose=1) # 日志展示格式
⑤项目总结
- 1.本文设计一个strip pooling模块(SPM),以有效地扩大骨干网络的感受野范围。 更具体地说,SPM由两个途径组成,它们专注于沿水平或垂直空间维度对远程上下文进行编码。对于池化特征图中的每个空间位置,它会对其全局的水平和垂直信息进行编码,然后使用这些编码来平衡其自身的权重以进行特征优化。
- 2.此外,提出了一种新颖的附加残差构建模块,称为混合池模块(MPM),以进一步在高语义级别上对远程依赖性进行建模。 它通过利用具有不同内核形状的池操作来收集内容丰富的上下文信息,以探查具有复杂场景的图像。
- 3.利用SP注意力机制改进模型设计,在相关评测数据集上取得了SOTA的效果。

学大模型,用大模型上飞桨星河社区!每天8点V100G算力免费领!免费领取ERNIE 4.0 100w Token >>>
更多推荐



 0
0 0
0- 0



 已为社区贡献1437条内容
已为社区贡献1437条内容

所有评论(0)