
PPYOLOE:又快又好的小目标检测训练与部署实现
使用PPYOLOE完成齿轮瑕疵检测任务,并通过Paddle Inference进行部署。
0 项目背景
PP-YOLOE是基于PP-YOLOv2的卓越的单阶段Anchor-free模型,超越了多种流行的YOLO模型。PP-YOLOE有一系列的模型,即s/m/l/x,可以通过width multiplier和depth multiplier配置。PP-YOLOE避免了使用诸如Deformable Convolution或者Matrix NMS之类的特殊算子,以使其能轻松地部署在多种多样的硬件上。
根据PaddleDetection给出的云端模型性能对比,各模型结构和骨干网络的代表模型在COCO数据集上精度mAP和单卡Tesla V100上预测速度(FPS)对比图如下:
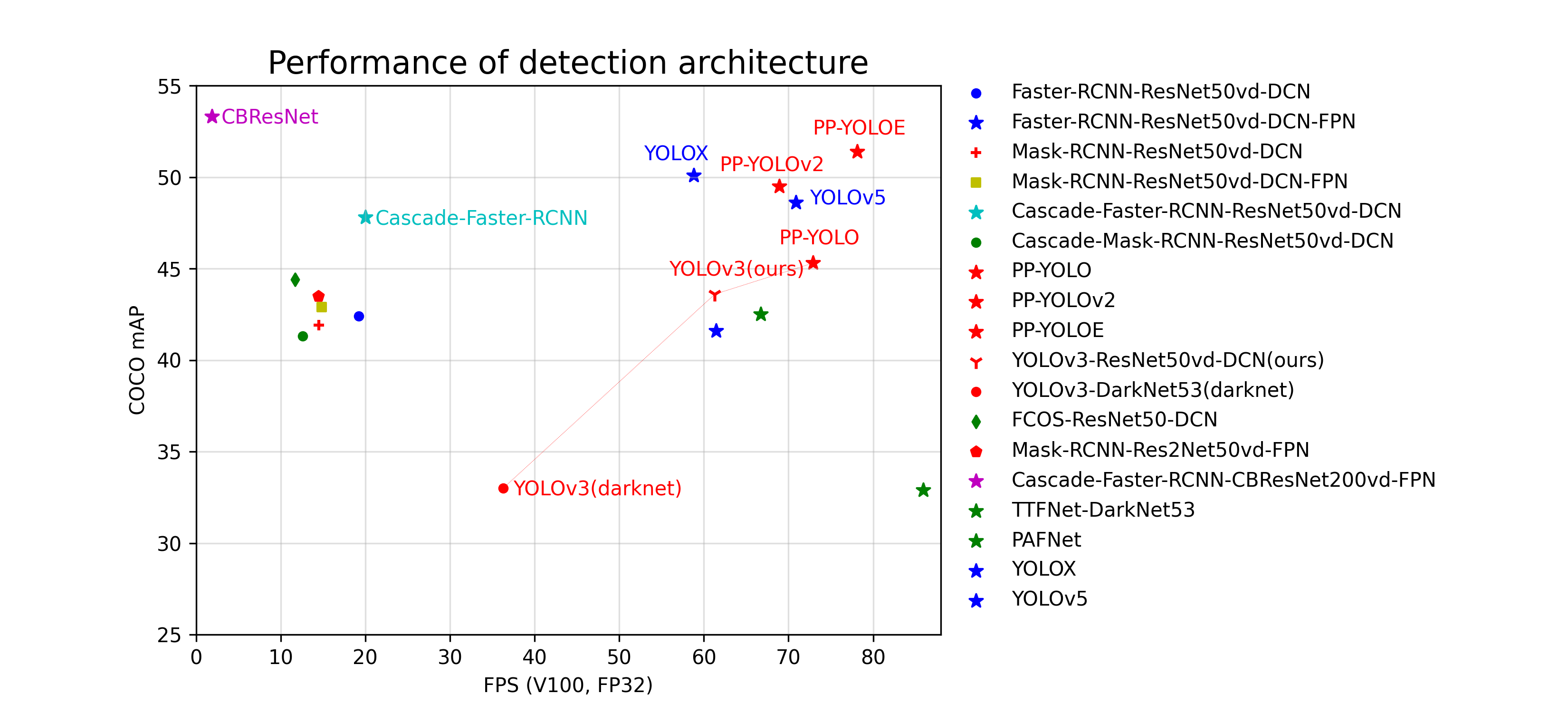
可以看出,PP-YOLOE真可谓是【又快又好】的典型!
这还不够,PaddleDetection团队还提供了基于PP-YOLOE的各种垂类检测模型的配置文件和权重,供用户下载进行使用:
| 场景 | 相关数据集 | 链接 |
|---|---|---|
| 行人检测 | CrowdHuman | pphuman |
| 车辆检测 | BDD100K、UA-DETRAC | ppvehicle |
| 小目标检测 | VisDrone | visdrone |
真是非常贴心了!
不过,在迁移到自己数据集上的时候,使用PP-YOLOE目前还有一些注意事项。因此,本文就以正在进行的兴智杯国产开发框架工程化应用赛:齿轮瑕疵检测任务为例,尝试基于PP-YOLOE的训练和部署流程,总结“踩坑”经验,对比训练和部署效果。
1 环境准备
1.1 数据集准备
数据集的分析和准备过程在项目
兴智杯国产开发框架工程化应用赛:齿轮瑕疵检测基线中有详细的介绍,这里就不再赘述。
总体结论就是,齿轮瑕疵数据集存在密集小目标,但也有大面积的瑕疵目标。相对而言,小目标容易漏检,大目标容易在IOU框选的时候有一定偏差(但是漏检少),在实际落地过程中,这个场景估计漏检问题会更大些。因此,在任务难点的处理、具体算法的选型上,本文仍然更加聚焦于对小目标的检测效果。
# 调用一些需要的第三方库
import numpy as np
import pandas as pd
import shutil
import json
import os
import cv2
import glob
import matplotlib.pyplot as plt
import matplotlib.patches as patches
import seaborn as sns
from matplotlib.font_manager import FontProperties
from PIL import Image
import random
myfont = FontProperties(fname=r"NotoSansCJKsc-Medium.otf", size=12)
plt.rcParams['figure.figsize'] = (12, 12)
plt.rcParams['font.family']= myfont.get_family()
plt.rcParams['font.sans-serif'] = myfont.get_name()
plt.rcParams['axes.unicode_minus'] = False
# 数据集解压缩:读者可以将数据集上传到AI Studio,再根据实际项目的具体路径,解压数据集
# 注意由于数据集文件名是中文,解压的时候要指定编码(也可以本地对数据集改名后再上传)
!unzip -O GBK data/data163113/齿轮检测数据集.zip -d ./data/
# 整理数据集结构,移除脏数据
!mv data/齿轮检测数据集/train/train_coco.json data/齿轮检测数据集/
!rm data/齿轮检测数据集/train/Thumbs.db
# 引入PaddleX
!pip install paddlex
# 组织数据目录
!mkdir MyDataset
!mkdir MyDataset/JPEGImages
!mv data/齿轮检测数据集/train/*.jpg MyDataset/JPEGImages/
!mv data/齿轮检测数据集/train_coco.json MyDataset/annotations.json
# 按比例切分数据集
!paddlex --split_dataset --format COCO --dataset_dir MyDataset --val_value 0.1 --test_value 0.0
1.2 训练环境准备
由于PP-YOLOE还在快速迭代中,因此,对框架的稳定性有一定的要求,PaddlePaddle的框架不要选择最新版。本文使用的单卡训练环境如下:
- 框架版本:PaddlePaddle 2.2.2
- CUDA Version: 11.2
- 模型库版本:PaddleDetection(develop分支)
选择PaddleDetection(develop分支)的原因是,PP-YOLOE的垂类模型迭代更快些,选择空间更大。
!git clone https://gitee.com/paddlepaddle/PaddleDetection.git
正克隆到 'PaddleDetection'...
remote: Enumerating objects: 27803, done.[K
remote: Counting objects: 100% (8273/8273), done.[K
remote: Compressing objects: 100% (3341/3341), done.[K
接收对象中: 17% (4876/27803), 14.54 MiB | 1.33 MiB/s
%cd PaddleDetection
/home/aistudio/PaddleDetection
# 切换到develop分支
!git checkout develop
2 模型训练
2.1 模型选型
正如前文所述,由于聚焦于小目标检测场景,本项目选择的是PP-YOLOE的垂类应用VisDrone-DET 检测模型。
PaddleDetection团队提供了针对VisDrone-DET小目标数航拍场景的基于PP-YOLOE的检测模型,本项目使用这些模型作为预训练模型。
参考资料:
整理后的COCO格式VisDrone-DET数据集下载链接,检测其中的10类,包括
pedestrian(1), people(2), bicycle(3), car(4), van(5), truck(6), tricycle(7), awning-tricycle(8), bus(9), motor(10),原始数据集下载链接。注意:
- VisDrone-DET数据集包括train集6471张,val集548张,test_dev集1610张,test-challenge集1580张(未开放检测框标注),前三者均有开放检测框标注。
- 模型均只使用train集训练,在val集和test_dev集上验证精度,test_dev集图片数较多,精度参考性较高。
由于齿轮瑕疵检测的图片分辨率是1400*2000,选择原图训练的配置就行了:
| 模型 | COCOAPI mAPval 0.5:0.95 |
COCOAPI mAPval 0.5 |
COCOAPI mAPtest_dev 0.5:0.95 |
COCOAPI mAPtest_dev 0.5 |
MatlabAPI mAPtest_dev 0.5:0.95 |
MatlabAPI mAPtest_dev 0.5 |
下载 | 配置文件 |
|---|---|---|---|---|---|---|---|---|
| PP-YOLOE-s | 23.5 | 39.9 | 19.4 | 33.6 | 23.68 | 40.66 | 下载链接 | 配置文件 |
| PP-YOLOE-P2-Alpha-s | 24.4 | 41.6 | 20.1 | 34.7 | 24.55 | 42.19 | 下载链接 | 配置文件 |
| PP-YOLOE-l | 29.2 | 47.3 | 23.5 | 39.1 | 28.00 | 46.20 | 下载链接 | 配置文件 |
| PP-YOLOE-P2-Alpha-l | 30.1 | 48.9 | 24.3 | 40.8 | 28.47 | 48.16 | 下载链接 | 配置文件 |
| PP-YOLOE-Alpha-largesize-l | 41.9 | 65.0 | 32.3 | 53.0 | 37.13 | 61.15 | 下载链接 | 配置文件 |
| PP-YOLOE-P2-Alpha-largesize-l | 41.3 | 64.5 | 32.4 | 53.1 | 37.49 | 51.54 | 下载链接 | 配置文件 |
模型库相关说明:
- P2表示增加P2层(1/4下采样层)的特征,共输出4个PPYOLOEHead。
- Alpha表示对CSPResNet骨干网络增加可一个学习权重参数Alpha参与训练。
- largesize表示使用以1600尺度为基础的多尺度训练和1920尺度预测,相应的训练batch_size也减小,以速度来换取高精度。
本项目以PP-YOLOE-Alpha-largesize-l为例,展示训练和部署过程。
2.2 典型报错FAQ
这里展示一些使用PP-YOLOE训练过程中出现的典型问题,方便读者在自行处理的时候进行对照。
2.2.1 Error: /paddle/paddle/phi/kernels/gpu/one_hot_kernel.cu错误
现象描述:这个报错往往是训练最初会发生的,一般最多出现1~2个epoch,就报这个错误,然后就训练不下去了。
[08/16 15:30:25] ppdet.engine INFO: Epoch: [0] [100/622] learning_rate: 0.000402 loss: 3.712770 loss_cls: 1.780970 loss_iou: 0.395123 loss_dfl: 1.810569 loss_l1: 1.676614 eta: 6:35:32 batch_cost: 0.4654 data_cost: 0.0017 ips: 4.2976 images/s
[08/16 15:31:20] ppdet.engine INFO: Epoch: [0] [200/622] learning_rate: 0.000804 loss: 4.230717 loss_cls: 1.631235 loss_iou: 0.532464 loss_dfl: 2.393337 loss_l1: 2.657236 eta: 6:24:20 batch_cost: 0.4526 data_cost: 0.0060 ips: 4.4190 images/s
Error: /paddle/paddle/phi/kernels/gpu/one_hot_kernel.cu:38 Assertion `p_in_data[idx] >= 0 && p_in_data[idx] < depth` failed. Illegal index value, Input(input) value should be greater than or equal to 0, and less than depth [70644], but received [94393729526616].
Error: /paddle/paddle/phi/kernels/gpu/one_hot_kernel.cu:38 Assertion `p_in_data[idx] >= 0 && p_in_data[idx] < depth` failed. Illegal index value, Input(input) value should be greater than or equal to 0, and less than depth [70644], but received [94393729526616].
Error: /paddle/paddle/phi/kernels/gpu/one_hot_kernel.cu:38 Assertion `p_in_data[idx] >= 0 && p_in_data[idx] < depth` failed. Illegal index value, Input(input) value should be greater than or equal to 0, and less than depth [70644], but received [94393729526616].
Error: /paddle/paddle/phi/kernels/gpu/one_hot_kernel.cu:38 Assertion `p_in_data[idx] >= 0 && p_in_data[idx] < depth` failed. Illegal index value, Input(input) value should be greater than or equal to 0, and less than depth [70644], but received [94393729526616].
Error: /paddle/paddle/phi/kernels/gpu/one_hot_kernel.cu:38 Assertion `p_in_data[idx] >= 0 && p_in_data[idx] < depth` failed. Illegal index value, Input(input) value should be greater than or equal to 0, and less than depth [70644], but received [94393729526616].
处理措施:学习率lr调低10倍。
- PP-YOLOE模型训练过程中使用8 GPUs进行混合精度训练,如果GPU卡数或者batch size发生了改变,你需要按照公式 lrnew = lrdefault * (batch_sizenew * GPU_numbernew) / (batch_sizedefault * GPU_numberdefault) 调整学习率。
2.2.2 Error: /paddle/paddle/fluid/operators/bce_loss_op.cu错误
现象描述:按照2.2.1章节的处理措施,调低学习率后,一般能够正常训练一段时间,但是,也发现在约30个epoch后,会有如下报错:
[08/17 04:42:36] ppdet.engine INFO: Epoch: [34] [200/636] learning_rate: 0.000045 loss: 1.808373 loss_cls: 0.863881 loss_iou: 0.192740 loss_dfl: 0.867038 loss_l1: 0.410710 eta: 4:10:03 batch_cost: 0.5026 data_cost: 0.0025 ips: 3.9794 images/s
[08/17 04:43:36] ppdet.engine INFO: Epoch: [34] [300/636] learning_rate: 0.000045 loss: 1.857809 loss_cls: 0.935418 loss_iou: 0.200950 loss_dfl: 0.891880 loss_l1: 0.405019 eta: 4:09:10 batch_cost: 0.5021 data_cost: 0.0094 ips: 3.9833 images/s
[08/17 04:44:37] ppdet.engine INFO: Epoch: [34] [400/636] learning_rate: 0.000045 loss: nan loss_cls: nan loss_iou: 0.202735 loss_dfl: nan loss_l1: 0.406280 eta: 4:08:19 batch_cost: 0.5199 data_cost: 0.0003 ips: 3.8468 images/s
Error: /paddle/paddle/fluid/operators/bce_loss_op.cu:38 Assertion `(x >= static_cast<T>(0)) && (x <= one)` failed. Input is expected to be within the interval [0, 1], but recieved nan.
Error: /paddle/paddle/fluid/operators/bce_loss_op.cu:38 Assertion `(x >= static_cast<T>(0)) && (x <= one)` failed. Input is expected to be within the interval [0, 1], but recieved nan.
Error: /paddle/paddle/fluid/operators/bce_loss_op.cu:38 Assertion `(x >= static_cast<T>(0)) && (x <= one)` failed. Input is expected to be within the interval [0, 1], but recieved nan.
Error: /paddle/paddle/fluid/operators/bce_loss_op.cu:38 Assertion `(x >= static_cast<T>(0)) && (x <= one)` failed. Input is expected to be within the interval [0, 1], but recieved nan.
Error: /paddle/paddle/fluid/operators/bce_loss_op.cu:38 Assertion `(x >= static_cast<T>(0)) && (x <= one)` failed. Input is expected to be within the interval [0, 1], but recieved nan.
Error: /paddle/paddle/fluid/operators/bce_loss_op.cu:38 Assertion `(x >= static_cast<T>(0)) && (x <= one)` failed. Input is expected to be within the interval [0, 1], but recieved nan.
Error: /paddle/paddle/fluid/operators/bce_loss_op.cu:38 Assertion `(x >= static_cast<T>(0)) && (x <= one)` failed. Input is expected to be within the interval [0, 1], but recieved nan.
原因猜测:据了解PaddleDetection团队训PP-YOLOE时也曾出现过这个问题,从报错信息看,应该还是学习率lr过大导致梯度爆炸,出现了nan值。
处置方式:
- 官方给出的办法是增大warmup然后把学习率调小一点,一般加载检测预训练模型学习率降低5倍,然后单卡训练学习率再降低8倍
- 实际使用时,为避免浪费训练时间,建议读者提高验证模型评估的频率(这样会多保存权重),比如把
snapshot_epoch从默认的10个epoch调整到1~2个,减少丢失训练结果的损失——当前,前提是项目空间够用哈。
2.3 模型训练
# 训练配置文件覆盖
!cp ../ppyoloe_crn_l_alpha_largesize_80e_visdrone.yml configs/visdrone/ppyoloe_crn_l_alpha_largesize_80e_visdrone.yml
!cp ../ppyoloe_crn_l_80e_visdrone.yml configs/visdrone/ppyoloe_crn_l_80e_visdrone.yml
!cp ../visdrone_detection.yml configs/datasets/visdrone_detection.yml
!cp ../optimizer_300e.yml configs/ppyoloe/_base_/optimizer_300e.yml
!cp ../ppyoloe_crn.yml configs/ppyoloe/_base_/ppyoloe_crn.yml
!cp ../ppyoloe_reader.yml configs/ppyoloe/_base_/ppyoloe_reader.yml
# 开始训练
!python tools/train.py -c configs/visdrone/ppyoloe_crn_l_alpha_largesize_80e_visdrone.yml --use_vdl=True --vdl_log_dir=./visdrone/ --eval
部分训练日志:
[08/17 01:54:52] ppdet.engine INFO: Epoch: [9] [ 0/636] learning_rate: 0.000061 loss: 2.164712 loss_cls: 1.039087 loss_iou: 0.227233 loss_dfl: 1.030005 loss_l1: 0.561055 eta: 6:29:58 batch_cost: 0.5084 data_cost: 0.0192 ips: 3.9339 images/s
[08/17 01:55:51] ppdet.engine INFO: Epoch: [9] [100/636] learning_rate: 0.000061 loss: 2.113271 loss_cls: 0.998488 loss_iou: 0.227426 loss_dfl: 0.987328 loss_l1: 0.534624 eta: 6:28:50 batch_cost: 0.4970 data_cost: 0.0015 ips: 4.0245 images/s
[08/17 01:56:52] ppdet.engine INFO: Epoch: [9] [200/636] learning_rate: 0.000061 loss: 2.006411 loss_cls: 0.952601 loss_iou: 0.220152 loss_dfl: 0.948838 loss_l1: 0.492396 eta: 6:27:57 batch_cost: 0.5170 data_cost: 0.0003 ips: 3.8684 images/s
[08/17 01:57:54] ppdet.engine INFO: Epoch: [9] [300/636] learning_rate: 0.000061 loss: 2.059717 loss_cls: 0.977535 loss_iou: 0.214905 loss_dfl: 0.993966 loss_l1: 0.536129 eta: 6:27:07 batch_cost: 0.5197 data_cost: 0.0003 ips: 3.8486 images/s
[08/17 01:58:54] ppdet.engine INFO: Epoch: [9] [400/636] learning_rate: 0.000061 loss: 1.958494 loss_cls: 0.982204 loss_iou: 0.210830 loss_dfl: 0.931854 loss_l1: 0.478746 eta: 6:26:10 batch_cost: 0.5113 data_cost: 0.0003 ips: 3.9115 images/s
[08/17 01:59:59] ppdet.engine INFO: Epoch: [9] [500/636] learning_rate: 0.000061 loss: 2.323247 loss_cls: 1.122770 loss_iou: 0.239496 loss_dfl: 1.036700 loss_l1: 0.639107 eta: 6:25:40 batch_cost: 0.5480 data_cost: 0.0003 ips: 3.6495 images/s
[08/17 02:00:59] ppdet.engine INFO: Epoch: [9] [600/636] learning_rate: 0.000061 loss: 2.256060 loss_cls: 1.116012 loss_iou: 0.230259 loss_dfl: 1.011723 loss_l1: 0.600375 eta: 6:24:42 batch_cost: 0.5087 data_cost: 0.0003 ips: 3.9318 images/s
[08/17 02:01:23] ppdet.utils.checkpoint INFO: Save checkpoint: output/ppyoloe_crn_l_alpha_largesize_80e_visdrone
loading annotations into memory...
Done (t=0.01s)
creating index...
index created!
loading annotations into memory...
Done (t=0.01s)
creating index...
index created!
[08/17 02:01:32] ppdet.engine INFO: Eval iter: 0
[08/17 02:02:25] ppdet.metrics.metrics INFO: The bbox result is saved to bbox.json.
loading annotations into memory...
Done (t=0.01s)
creating index...
index created!
[08/17 02:02:25] ppdet.metrics.coco_utils INFO: Start evaluate...
Loading and preparing results...
DONE (t=1.27s)
creating index...
index created!
Running per image evaluation...
Evaluate annotation type *bbox*
DONE (t=6.55s).
Accumulating evaluation results...
DONE (t=0.24s).
Average Precision (AP) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.338
Average Precision (AP) @[ IoU=0.50 | area= all | maxDets=100 ] = 0.640
Average Precision (AP) @[ IoU=0.75 | area= all | maxDets=100 ] = 0.314
Average Precision (AP) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.189
Average Precision (AP) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.387
Average Precision (AP) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.268
Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 1 ] = 0.034
Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 10 ] = 0.220
Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.515
Average Recall (AR) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.344
Average Recall (AR) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.518
Average Recall (AR) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.510
[08/17 02:02:33] ppdet.engine INFO: Total sample number: 126, averge FPS: 2.1065789575539347
[08/17 02:02:33] ppdet.engine INFO: Best test bbox ap is 0.338.
[08/17 02:02:35] ppdet.utils.checkpoint INFO: Save checkpoint: output/ppyoloe_crn_l_alpha_largesize_80e_visdrone
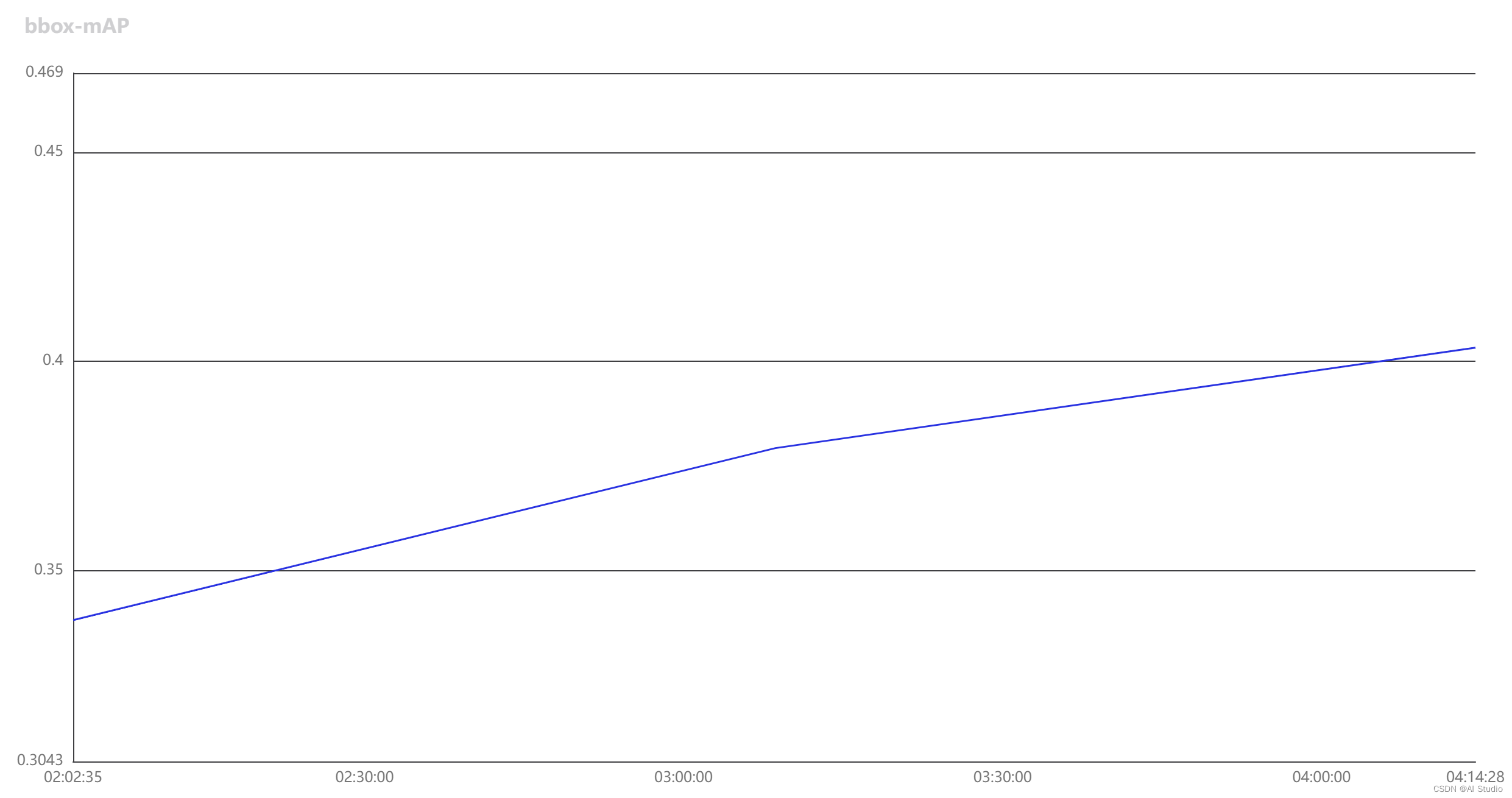
应该说,同样是针对小目标检测场景的垂类模型,基于PP-YOLOE的PP-YOLOE-Alpha-largesize-l训练起来要比基线项目用的ppyolo_r50vd_dcn_1x_sniper_visdrone快得多了,而且收敛速度非常好。
训练10个epoch耗时在60分钟左右,mAP也快速爬升到了0.6+,正所谓名副其实的又好又快!
# 训练30个epoch后的模型评估
!python tools/eval.py -c configs/visdrone/ppyoloe_crn_l_alpha_largesize_80e_visdrone.yml -o weights=output/ppyoloe_crn_l_alpha_largesize_80e_visdrone/best_model.pdparams
Warning: Unable to use OC-SORT, please install filterpy, for example: `pip install filterpy`, see https://github.com/rlabbe/filterpy
Warning: import ppdet from source directory without installing, run 'python setup.py install' to install ppdet firstly
W0816 20:23:42.663739 27511 device_context.cc:447] Please NOTE: device: 0, GPU Compute Capability: 7.0, Driver API Version: 11.2, Runtime API Version: 10.1
W0816 20:23:42.668613 27511 device_context.cc:465] device: 0, cuDNN Version: 7.6.
loading annotations into memory...
Done (t=0.01s)
creating index...
index created!
[08/16 20:23:47] ppdet.utils.checkpoint INFO: Finish loading model weights: output/ppyoloe_crn_l_alpha_largesize_80e_visdrone/best_model.pdparams
[08/16 20:23:47] ppdet.engine INFO: Eval iter: 0
[08/16 20:24:06] ppdet.engine INFO: Eval iter: 100
[08/16 20:24:18] ppdet.metrics.metrics INFO: The bbox result is saved to bbox.json.
loading annotations into memory...
Done (t=0.02s)
creating index...
index created!
[08/16 20:24:18] ppdet.metrics.coco_utils INFO: Start evaluate...
Loading and preparing results...
DONE (t=0.86s)
creating index...
index created!
Running per image evaluation...
Evaluate annotation type *bbox*
DONE (t=6.48s).
Accumulating evaluation results...
DONE (t=0.26s).
Average Precision (AP) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.426
Average Precision (AP) @[ IoU=0.50 | area= all | maxDets=100 ] = 0.753
Average Precision (AP) @[ IoU=0.75 | area= all | maxDets=100 ] = 0.436
Average Precision (AP) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.262
Average Precision (AP) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.431
Average Precision (AP) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.358
Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 1 ] = 0.040
Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 10 ] = 0.265
Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.570
Average Recall (AR) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.413
Average Recall (AR) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.553
Average Recall (AR) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.631
[08/16 20:24:26] ppdet.engine INFO: Total sample number: 153, averge FPS: 5.289391904716642
2.4 预测推理
# 准备一个放测试集图片的目录,然后将待预测的示例图片移至该目录下
!unzip -O GBK ../data/data163113/齿轮检测A榜评测数据.zip -d ../data/
!mkdir ../data/test
!mv ../data/齿轮检测A榜评测数据/val/*.jpg ../data/test/
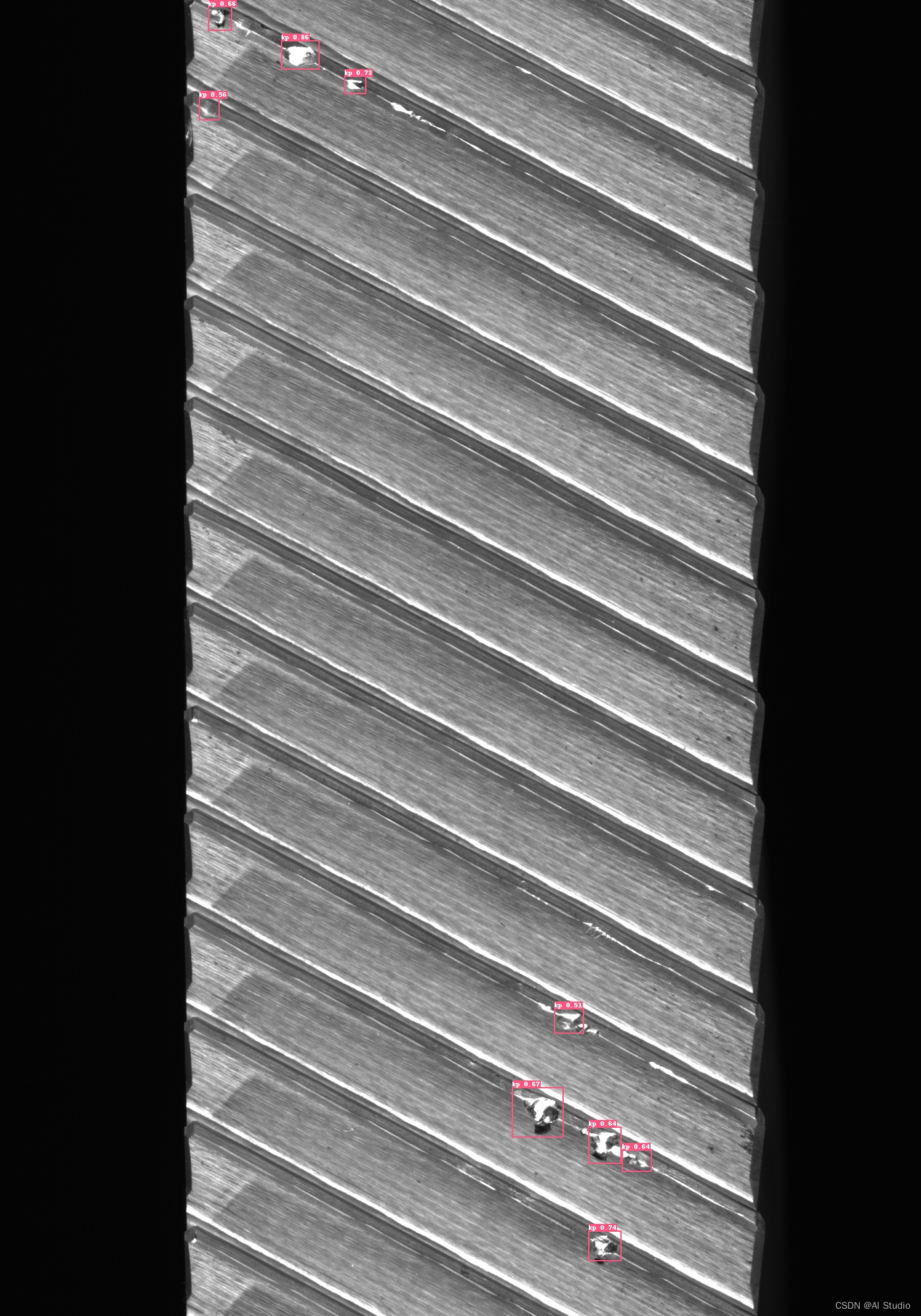
# 挑一张验证集的图片展示预测效果
!python tools/infer.py -c configs/visdrone/ppyoloe_crn_l_alpha_largesize_80e_visdrone.yml -o weights=output/ppyoloe_crn_l_alpha_largesize_80e_visdrone/best_model --infer_img=../data/test/1__H2_817171_IO-NIO198M_210121A0050-1-1.jpg --save_results=True
Warning: Unable to use OC-SORT, please install filterpy, for example: `pip install filterpy`, see https://github.com/rlabbe/filterpy
Warning: import ppdet from source directory without installing, run 'python setup.py install' to install ppdet firstly
W0816 21:57:01.822957 8111 device_context.cc:447] Please NOTE: device: 0, GPU Compute Capability: 7.0, Driver API Version: 11.2, Runtime API Version: 10.1
W0816 21:57:01.828608 8111 device_context.cc:465] device: 0, cuDNN Version: 7.6.
[08/16 21:57:06] ppdet.utils.checkpoint INFO: Finish loading model weights: output/ppyoloe_crn_l_alpha_largesize_80e_visdrone/best_model.pdparams
loading annotations into memory...
Done (t=0.01s)
creating index...
index created!
loading annotations into memory...
Done (t=0.01s)
creating index...
index created!
100%|█████████████████████████████████████████████| 1/1 [00:00<00:00, 1.85it/s]
[08/16 21:57:06] ppdet.metrics.metrics INFO: The bbox result is saved to bbox.json.
[08/16 21:57:06] ppdet.metrics.metrics INFO: The bbox result is saved to output/bbox.json and do not evaluate the mAP.
[08/16 21:57:06] ppdet.engine INFO: Detection bbox results save in output/1__H2_817171_IO-NIO198M_210121A0050-1-1.jpg
2.5 生成提交结果
因为这个比赛还在进行,读者也可以用测试集生成提交结果,验证下训练效果。
# 按照提交格式要求生成相应结果
# 注意到bbox格式要求是xyxy,同时要生成预测图片路径的对照id表
!cp ../infer.py tools/infer.py
.py
!cp ../json_results.py ppdet/metrics/json_results.py
# 执行批量预测,并生成含有预测结果的bbox.json文件
!python tools/infer.py -c configs/visdrone/ppyoloe_crn_l_alpha_largesize_80e_visdrone.yml -o weights=output/ppyoloe_crn_l_alpha_largesize_80e_visdrone/best_model --infer_dir=../data/test --save_results=True
with open('output/bbox.json', 'r') as f1:
results = json.load(f1)
with open('output/id2path.json', 'r') as f2:
id2path = json.load(f2)
upload_json = []
for i in range(len(results)):
dt = {}
dt['name'] = os.path.basename(id2path[str(results[i]['image_id'])])
dt['category_id'] = results[i]['category_id']
dt['bbox'] = results[i]['bbox']
dt['score'] = results[i]['score']
upload_json.append(dt)
# 生成上传文件
with open('../upload.json','w') as f:
json.dump(upload_json,f)
3 模型部署
同样是小目标检测,相比于SNIPER: Efficient Multi-Scale Training暂不支持部署,PP-YOLOE是可以直接导出部署模型,并在多端高性能部署的:
- Paddle Inference Python & C++
- Paddle-TensorRT
- PaddleServing
- PaddleSlim模型量化
接下来,我们将介绍PP-YOLOE如何使用Paddle Inference进行部署。
3.1 导出模型
!python tools/export_model.py -c configs/visdrone/ppyoloe_crn_l_alpha_largesize_80e_visdrone.yml -o weights=output/ppyoloe_crn_l_alpha_largesize_80e_visdrone/best_model.pdparams trt=True
Warning: Unable to use OC-SORT, please install filterpy, for example: `pip install filterpy`, see https://github.com/rlabbe/filterpy
Warning: import ppdet from source directory without installing, run 'python setup.py install' to install ppdet firstly
[08/17 10:35:51] ppdet.utils.checkpoint INFO: Finish loading model weights: output/ppyoloe_crn_l_alpha_largesize_80e_visdrone/best_model.pdparams
loading annotations into memory...
Done (t=0.01s)
creating index...
index created!
[08/17 10:35:52] ppdet.engine INFO: Export inference config file to output_inference/ppyoloe_crn_l_alpha_largesize_80e_visdrone/infer_cfg.yml
[08/17 10:36:02] ppdet.engine INFO: Export model and saved in output_inference/ppyoloe_crn_l_alpha_largesize_80e_visdrone
3.2 Paddle Inference部署
!python deploy/python/infer.py --model_dir=output_inference/ppyoloe_crn_l_alpha_largesize_80e_visdrone --image_file=../data/test/1__H2_817171_IO-NIO198M_210121A0050-1-1.jpg --run_mode=paddle --device=gpu
----------- Running Arguments -----------
action_file: None
batch_size: 1
camera_id: -1
cpu_threads: 1
device: gpu
enable_mkldnn: False
enable_mkldnn_bfloat16: False
image_dir: None
image_file: ../data/test/1__H2_817171_IO-NIO198M_210121A0050-1-1.jpg
model_dir: output_inference/ppyoloe_crn_l_alpha_largesize_80e_visdrone
output_dir: output
random_pad: False
reid_batch_size: 50
reid_model_dir: None
run_benchmark: False
run_mode: paddle
save_images: False
save_mot_txt_per_img: False
save_mot_txts: False
save_results: False
scaled: False
threshold: 0.5
tracker_config: None
trt_calib_mode: False
trt_max_shape: 1280
trt_min_shape: 1
trt_opt_shape: 640
use_dark: True
use_gpu: False
video_file: None
window_size: 50
------------------------------------------
----------- Model Configuration -----------
Model Arch: YOLO
Transform Order:
--transform op: Resize
--transform op: NormalizeImage
--transform op: Permute
--------------------------------------------
class_id:2, confidence:0.8580, left_top:[427.85,62.45],right_bottom:[485.58,104.78]
class_id:2, confidence:0.7437, left_top:[894.47,1871.94],right_bottom:[944.15,1915.34]
class_id:2, confidence:0.7312, left_top:[523.77,116.94],right_bottom:[556.91,141.03]
class_id:2, confidence:0.6670, left_top:[778.52,1653.63],right_bottom:[856.76,1727.74]
class_id:2, confidence:0.6586, left_top:[316.61,10.59],right_bottom:[352.05,45.51]
class_id:2, confidence:0.6445, left_top:[894.24,1713.68],right_bottom:[944.74,1767.45]
class_id:2, confidence:0.6427, left_top:[945.76,1748.26],right_bottom:[990.50,1779.27]
class_id:2, confidence:0.5628, left_top:[302.49,149.41],right_bottom:[333.08,181.53]
class_id:2, confidence:0.5099, left_top:[842.38,1533.12],right_bottom:[887.47,1569.02]
save result to: output/1__H2_817171_IO-NIO198M_210121A0050-1-1.jpg
Test iter 0
------------------ Inference Time Info ----------------------
total_time(ms): 2034.1, img_num: 1
average latency time(ms): 2034.10, QPS: 0.491618
preprocess_time(ms): 1941.00, inference_time(ms): 93.00, postprocess_time(ms): 0.10
3.3 导出ONNX模型
PP-YOLOE同时提供了ONNX导出方案。
# 安装paddle2onnx
!pip install onnx
!pip install paddle2onnx
!pip install onnxruntime
# 转换成onnx格式
!paddle2onnx --model_dir output_inference/ppyoloe_crn_l_alpha_largesize_80e_visdrone --model_filename model.pdmodel --params_filename model.pdiparams --opset_version 11 --save_file ppyoloe_crn_l_alpha_largesize_80e_visdrone.onnx
[1;31;40m2022-08-17 10:47:54 [WARNING] [Deprecated] `paddle2onnx.command.program2onnx` will be deprecated in the future version, the recommended usage is `paddle2onnx.export`[0m
[1;31;40m2022-08-17 10:48:05 [WARNING] Due to the operator:multiclass_nms3, the converted ONNX model will only supports input[batch_size] == 1.[0m
2022-08-17 10:48:08 [INFO] ONNX model generated is valid.
2022-08-17 10:48:09 [INFO] ONNX model saved in ppyoloe_crn_l_alpha_largesize_80e_visdrone.onnx
2022-08-17 10:48:09 [INFO] ===============Make PaddlePaddle Better!================
2022-08-17 10:48:09 [INFO] A little survey: https://iwenjuan.baidu.com/?code=r8hu2s
# 测试模型
import os
import onnxruntime
def load_onnx(model_dir):
model_path = os.path.join(model_dir, 'ppyoloe_crn_l_alpha_largesize_80e_visdrone.onnx')
session = onnxruntime.InferenceSession(model_path)
input_names = [input.name for input in session.get_inputs()]
output_names = [output.name for output in session.get_outputs()]
return session, input_names, output_names
session, input_names, output_names = load_onnx('./')
print(input_names, output_names)
['image', 'scale_factor'] ['multiclass_nms3_0.tmp_0', 'multiclass_nms3_0.tmp_2']
2022-08-17 10:53:42.614052816 [W:onnxruntime:, graph.cc:3494 CleanUnusedInitializersAndNodeArgs] Removing initializer 'Constant_68'. It is not used by any node and should be removed from the model.
ONNX模型的部署可参考@寂寞你快进去大佬的项目:
使用 ONNX 部署 PaddleDetection 目标检测模型
4 小结
本项目使用PP-YOLOE升级了齿轮瑕疵检测任务的基线方案,体验了PP-YOLOE“又快又好”的SOTA性能,并完成了基于Paddle Inference的部署实现,为项目后续产业落地提供了更加有效的参考。
此文章为搬运
原项目链接

学大模型,用大模型上飞桨星河社区!每天8点V100G算力免费领!免费领取ERNIE 4.0 100w Token >>>
更多推荐



 3
3 0
0- 0



 已为社区贡献1437条内容
已为社区贡献1437条内容

所有评论(0)